
Overview
A research hub to develop algorithmic AI and robotic tools to enable autonomous, robust, and flexible self-driving labs at the AC
Vision
The AI and automation lab’s vision is to advance robotics toward robust, shared, and scalable autonomy, where robots can reliably operate alongside humans in complex, real-world environments. In self-driving laboratories today, robotics remains a critical bottleneck: manipulation is brittle, perception struggles with transparent, deformable, and fragile labware, and planning systems often fail to adapt to uncertainty, long horizons, and unexpected failures, preventing true 24/7 autonomy.
At our lab, we focus on overcoming these challenges by tightly integrating robot manipulation, computer vision, and learning-based agentic reasoning and planning systems into a unified robotic autonomy stack. We develop robots that can perceive the state of experiments, reason over tasks and constraints, and execute manipulation robustly through closed-loop control, digital twins, and data-driven learning. By combining physics-aware simulation, large-scale data collection, and adaptive planning, the lab transforms robots from scripted tools into dynamic scientific collaborators, enabling autonomous labs that run continuously, recover from errors, and dramatically accelerate discovery in chemistry, materials science, and biology.
Application areas
Below is a selection of this lab's application areas. Don't see what you're looking for? Reach out to learn more.


Select project highlights

A GPU-accelerated, multiscale digital-twin framework for chemistry laboratories to support sim-to-real development of automated laboratory workflows in silico, while reducing the need for costly, time-consuming real-world experimentation
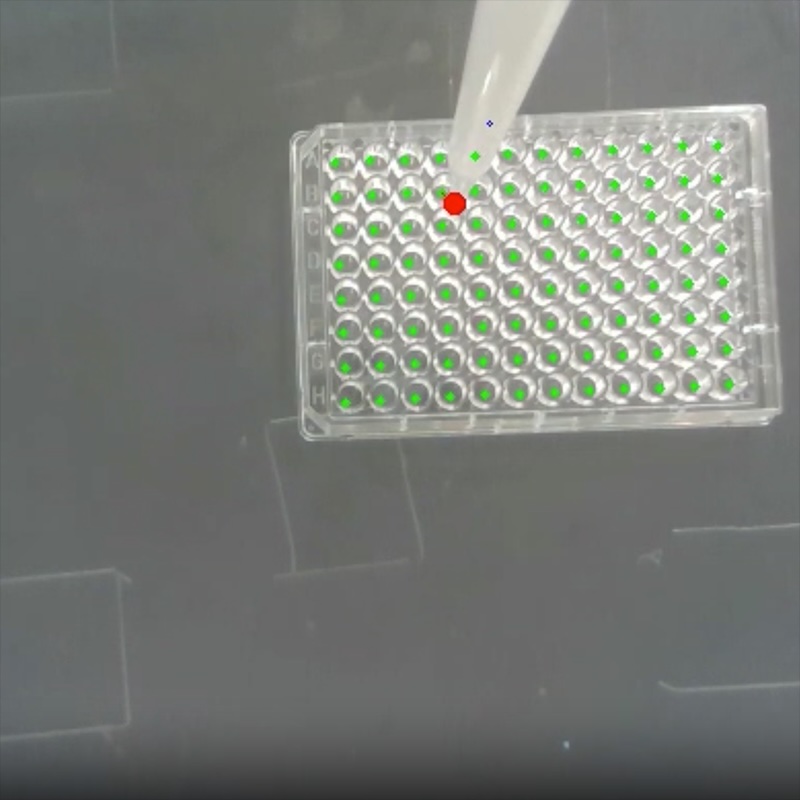
Building a robot scientist by developing foundation model-based manipulation that can perceive, reason, and act across diverse laboratory objects and tasks, enabling robust, general-purpose robotic experimentation with minimal task-specific engineering
General orchestrator for self-driving laboratories, assuring safe and seamless execution of closed-loop experiments




Meet our scientific advisors


Select equipment
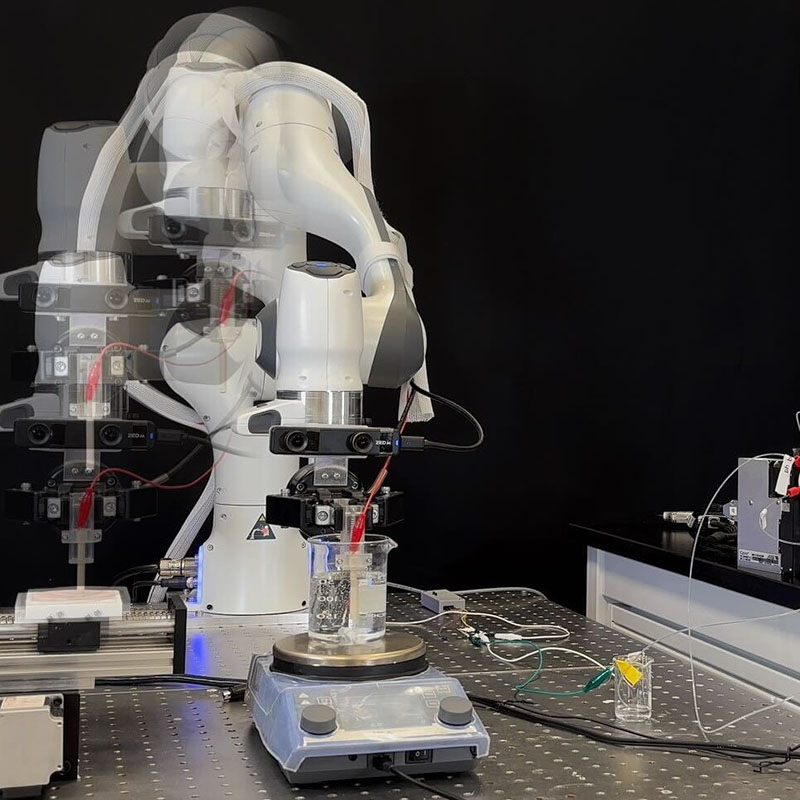
3 UR robot arms with cameras: to manipulate objects in the self-driving labs and perform experiments
An OT-2 liquid handler that the robots interact with to enable automated, end-to-end experimental workflows, including solution dispensing